 Python 학습하기👆
Python 학습하기👆

티스토리 뷰
"배선 줄이고, 통신 효율 올리고!" CAN 통신이 왜 이렇게 많이 쓰이는지, 제대로 한번 파헤쳐볼까요?
안녕하세요 여러분! 요즘 자동차 전자장비를 공부하면서 'CAN 통신'이라는 단어를 정말 자주 듣게 되더라구요. 예전엔 '이게 도대체 뭐야?' 싶었는데, 알고 보니 웬만한 스마트 장비나 산업용 기계 안에는 다 들어있더라고요. 이번 글에서는 제가 실습하면서 겪은 시행착오부터 실제 현장에서 어떻게 쓰이는지까지, 알짜배기 정보만 모아서 전해드릴게요. CAN 통신 처음 들어보시는 분도 걱정 마세요. 하나씩 친절하게 풀어드릴게요!
목차
CAN 통신이란 무엇인가?

CAN(Controller Area Network) 통신은 1980년대 보쉬(Bosch)에서 자동차 내부 장치들 간의 통신을 위해 개발한 프로토콜이에요. 한마디로, 차량의 센서, ECU, 계기판, 전동 모터 같은 다양한 장치들이 서로 효율적으로 데이터를 주고받게 해주는 기술이죠. 여기서 중요한 건 '중앙 제어장치 없이' 여러 장치가 직접 데이터를 주고받는다는 점이에요. 그래서 배선이 줄고, 통신 속도도 안정적이에요. 요즘은 자동차뿐 아니라 로봇, 엘리베이터, 산업용 기계에서도 흔히 사용되고 있어요.
CAN 통신의 기본 구조와 특징

CAN 통신의 가장 큰 특징은 멀티 마스터 방식이라는 거예요. 즉, 모든 노드가 데이터를 보낼 수 있고, 버스 충돌이 나지 않도록 자동 중재가 이루어지죠. 또 하나의 핵심은 ‘우선순위’ 개념인데요, 식별자(ID)가 낮을수록 우선순위가 높아 더 빠르게 전송돼요. 아래 표에서 주요 구조를 간단히 정리해볼게요.
| 구성 요소 | 설명 |
|---|---|
| CAN 버스 | 노드 간 데이터를 교환하는 두 개의 신호선 (CAN_H, CAN_L) |
| 노드 | 송수신이 가능한 장치, ECU 등이 해당 |
| 프레임 | 데이터, 식별자, 제어 비트로 구성된 데이터 단위 |
주요 활용 분야 및 사례

CAN 통신은 생각보다 더 다양한 분야에서 쓰이고 있어요. 특히 아래 리스트에 나온 예시는 제가 직접 본 것들도 있어서 더 확실히 말씀드릴 수 있어요.
- 자동차 내 전자 제어 시스템 (엔진, ABS, 에어백 등)
- 공장 자동화 시스템 (PLC, 센서 간 데이터 공유)
- 엘리베이터, 에스컬레이터 등 제어 시스템
- 로봇 및 드론 제어 시스템
CAN 통신 vs 다른 통신 방식

CAN 통신이 좋다고는 하지만, 다른 통신 방식이랑 비교했을 때 어떤 차이가 있을까요? 솔직히 말하면, 각각의 방식마다 장단점이 뚜렷해요. 예를 들어 UART는 간단하고 저렴하지만 장거리엔 약하고, Ethernet은 속도는 빠르지만 복잡하죠. 아래 표에서 CAN과 자주 비교되는 통신 방식들을 한눈에 정리해봤어요.
| 항목 | CAN | UART | Ethernet |
|---|---|---|---|
| 전송 속도 | 1Mbps 이하 | 최대 115200bps | 수백 Mbps ~ Gbps |
| 신뢰성 | 중재/우선순위로 안정적 | 충돌 발생 시 재전송 필요 | 패킷 손실 대비 프로토콜 필요 |
| 복잡성 | 중간 | 간단 | 복잡 |
CAN 프레임 구성요소 분석
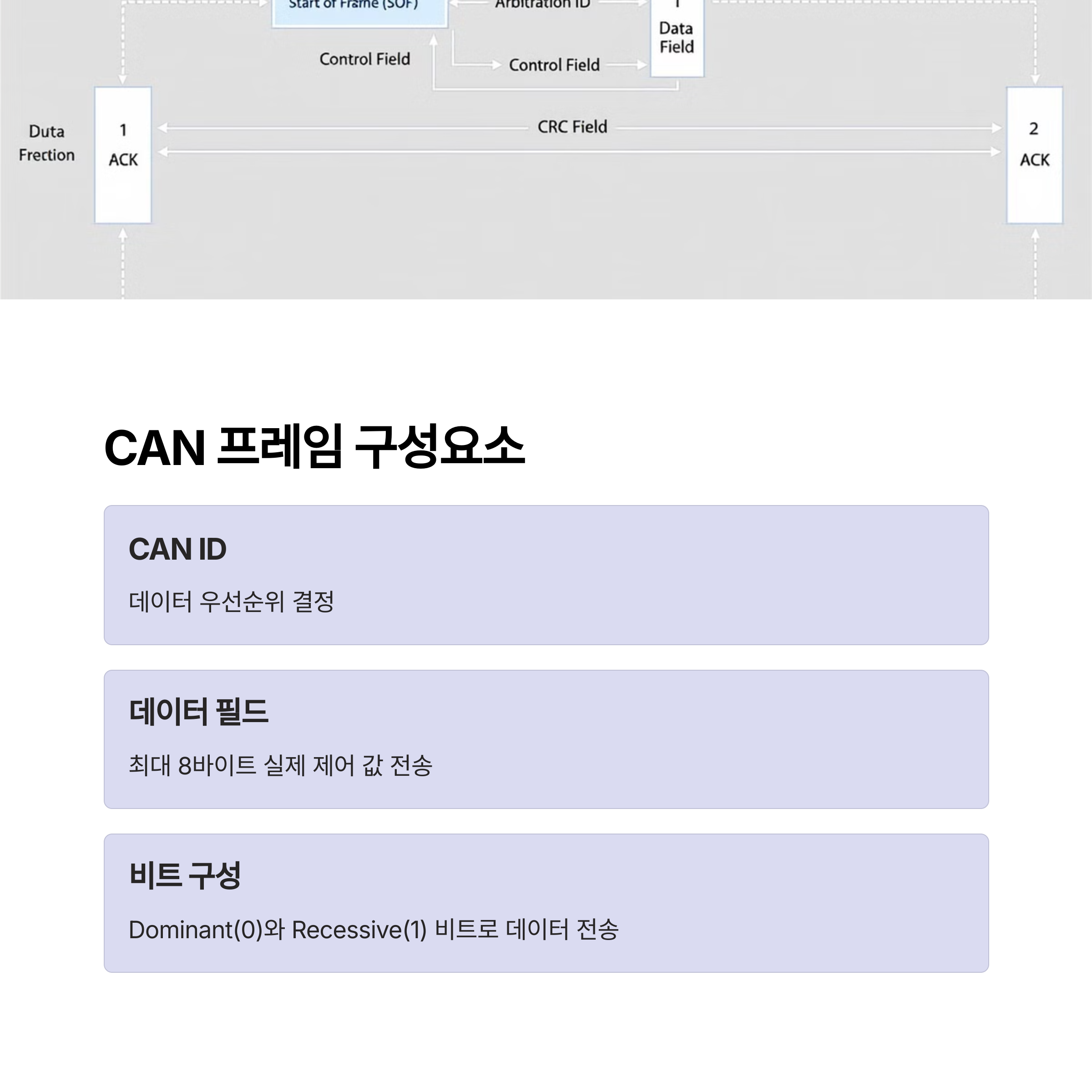
CAN 통신에서 데이터가 실리는 단위는 '프레임'이에요. 프레임은 다양한 필드들로 구성되며, 각각의 역할이 명확해요. 실제로 분석해보면 데이터뿐 아니라 오류 체크, 우선순위 조정 등도 다 이 안에 들어 있어요. 아래 표에서 각 필드의 역할을 살펴볼게요.
| 필드 | 역할 |
|---|---|
| Start of Frame | 프레임 시작 알림 |
| Identifier | 메시지 우선순위와 목적지 결정 |
| Data Field | 실제 데이터 (최대 8바이트) |
| CRC | 오류 검출용 체크섬 |
CAN 통신 실습 중 자주 겪는 문제와 해결법

실제로 CAN 통신을 다뤄보면 생각보다 자잘한 문제들이 많아요. 저도 처음엔 왜 통신이 안 되나 몇 시간 헤매곤 했죠. 그래서 흔히 발생하는 문제와 간단한 해결책을 아래에 정리해봤어요.
- 터미네이션 저항 누락 → 양단에 120Ω 저항 꼭 연결!
- ID 충돌 → 노드마다 고유한 식별자 사용 필수
- 데이터 전송 실패 → 전압 레벨 확인 (CAN_H vs CAN_L)
전혀 아니에요! 공장 자동화, 로봇, 드론, 엘리베이터 제어 등 다양한 분야에서 쓰이고 있어요.
보통 1Mbps 이하로 동작하며, 안정성과 신뢰성이 더 중요한 곳에서 사용돼요.
CAN 인터페이스가 있는 마이컴(예: STM32), CAN 트랜시버, 그리고 터미네이션 저항이 필요해요.
식별자 기반 중재 방식으로 우선순위가 높은 메시지가 자동으로 전송돼요. 충돌 없이 처리됩니다.
프레임 안에 있는 CRC 필드를 통해 오류를 자동 검출하고, 오류 플래그로 알림을 줘요.
CAN-FD는 'Flexible Data rate'의 약자로, 기존보다 더 많은 데이터를 빠르게 전송할 수 있는 확장 버전이에요.
오늘도 이렇게 끝까지 읽어주셔서 정말 감사해요. 솔직히 처음엔 'CAN 통신? 그게 뭔데?' 싶었던 분들도, 이제는 최소한 기본 개념부터 실습 팁까지 쏙쏙 이해하셨을 거라 믿어요.
'개발 > 그 외 개발관련' 카테고리의 다른 글
| UDS 서비스 목록 (0) | 2025.03.27 |
|---|---|
| UDS ECU Firmware Download Services (example) (0) | 2025.03.27 |
| 자동차 진단 프로토콜 UDS(ISO 14229) 개념과 활용 (0) | 2025.03.17 |
| Visual Studio Code로 Win32 DLL(64bit) 개발 환경 설정하기 (0) | 2025.03.13 |
| TRACE32 자주 사용하는 기능 소개 (0) | 2025.02.12 |